二、构建方法
智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
构建科学、合理的智能网联汽车标准体系,应充分考虑不同层面的基本情况并理清构建思路:面向未来技术,避免对技术创新和产业发展形成的制约;以智能化为主,同时考虑智能化和网联化两条路径;立足基本国情,适应我国道路交通特点与产业需求;科学进行分类,合理确定层级、定位和适用范围;确定工作进度,加快急需标准项目的制修订;强化体系协调,实现与其它相关行业标准的兼容;坚持开放态度,积极参与国际标准法规的制定与协调。在充分考虑以上构建思路的基础上,着重从技术逻辑结构和产品物理结构两个层面进行系统分析,剖析智能网联汽车技术和产品基本特性,构建整个标准体系。
(一)技术逻辑结构
智能网联汽车技术逻辑的两条主线是“信息”和“控制”,其发展的核心是由系统进行信息感知、决策预警和智能控制,逐渐替代驾驶员,并最终完全自主执行全部驾驶任务(如图1所-4-示)。智能网联汽车通过智能化与网联化两条技术路径协同实现“信息”和“控制”功能,可据此进行功能等级划分(见附件2)。
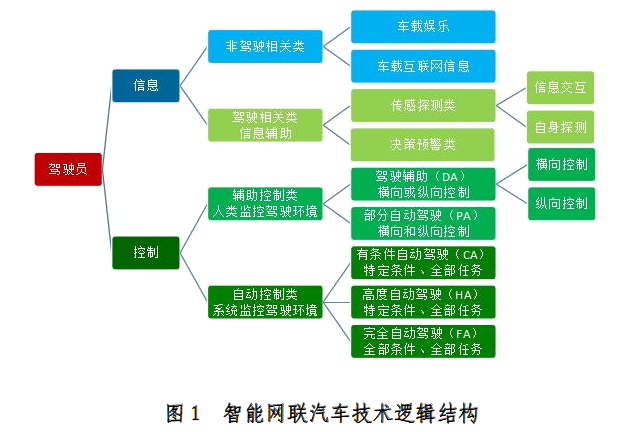
在信息方面,根据信息对驾驶行为的影响和相互关系分为“驾驶相关类信息”和“非驾驶相关类信息”;其中,“驾驶相关类信息”包括传感探测类和决策预警类,“非驾驶相关类信息”主要包括车载娱乐服务和车载互联网信息服务。传感探测类又可根据信息获取方式进一步细分为依靠车辆自身传感器直接探测所获取的信息(自身探测)和车辆通过车载通信装置从外部其它节点所接受的信息(信息交互)。“智能化+网联化”相融合可以使车辆在自身传感器直接探测的基础上,通过与外部节点的信息交互,实现更加全面的环境感知,从而更好地支持车辆决策和控-5-制。
在控制方面,根据车辆和驾驶员在车辆控制方面的作用和职责,区分为“辅助控制类”和“自动控制类”,分别对应不同等级的智能控制。其中,辅助控制类主要指车辆利用各类电子技术辅助驾驶员进行车辆控制,如横向(方向)控制和纵向(速度)控制及其组合,可分为驾驶辅助(DA)和部分自动驾驶(PA);自动控制类则根据车辆自主控制以及替代人进行驾驶的场景和条件进一步细分为有条件自动驾驶(CA)、高度自动驾驶(HA)和完全自动驾驶(FA)。
(二)产品物理结构
智能网联汽车的产品物理结构是把技术逻辑结构所涉及的各种“信息”与“控制”功能落实到物理载体上。车辆控制系统、车载终端、交通设施、外接设备等按照不同的用途,通过不同的网络通道、软件或平台对采集或接收到的信息进行传输、处理和执行,从而实现了不同的功能或应用(如图2所示)。
功能与应用层根据产品形态、功能类型和应用场景,分为车载信息类、智能驾驶辅助类、自动驾驶类以及协同控制类等,涵盖与智能网联汽车相关各类产品所应具备的基本功能。
软件和平台层主要涵盖大数据平台、云计算平台和操作系统等基础平台产品,以及资讯、娱乐、导航和诊断等应用软件产品,共同为智能网联汽车相关功能的实现提供平台级、系统级和应用级的服务。
网络和传输层根据通信的不同应用范围,分为车内总线通信、车内局域通信、短程通信和广域通信,是信息传递的“管道”。
设备终端层按照不同的功能或用途,分为车辆控制系统、车载终端、交通设施终端、外接设备等,各类设备和终端是车辆与外界进行信息交互的载体,同时也作为人机交互界面,成为连接“人”和“系统”的载体。
基础和通用层涵盖电气/电子环境以及行为协调规则。安装在智能网联汽车上的设备、终端或系统需要利用汽车电源,在满足汽车特有的电气、电磁环境要求下实现其功能;设备、终端或系统间的信息交互和行为协调也应在统一的规则下进行。
此外,产品物理结构中还包括功能安全和信息安全两个重要组成部分,两者作为智能网联汽车各类产品和应用需要普遍满足的基本条件,贯穿于整个产品物理结构之中,是智能网联汽车各类产品和应用实现安全、稳定、有序运行的可靠保障。
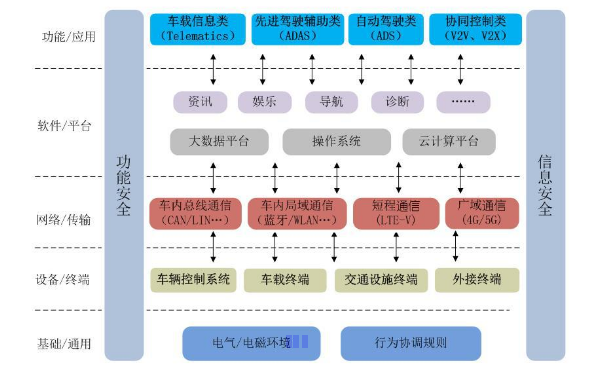
图2智能网联汽车产品物理结构
 如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。
如发现本站文章存在版权问题,烦请联系editor@askci.com我们将及时沟通与处理。


 2020年全球100家最具潜力人工智能初创企业排行榜
2020年全球100家最具潜力人工智能初创企业排行榜
 “新基建”赋能轨道交通 城际高速铁路和城际轨道交通产业链全景图分析(图)
“新基建”赋能轨道交通 城际高速铁路和城际轨道交通产业链全景图分析(图)
 中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
中商产业研究院:《2020年中国加氢站行业市场前景及投资研究报告》发布
 锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析
锤子科技CEO罗永浩跨界电商直播 一文看懂我国电商直播发展如何?
中商产业研究院:《2020年中国MCN行业市场前景及投资研究报告》发布
2020年1-2月全国汽油产量为2044万吨 同比下降13.9%
2020年1-2月全国发电量同比下降8.2%
2020年1-2月全国集成电路产量为296.3亿块 同比增长8.5%
2020年受疫情影响较大的行业分析系列之三——旅游行业篇(图)
2020年1-2月全国光缆产量统计数据分析